|
中文 | ENGLISH |
| 华捷艾米:深度摄像头让移动机器人拥有视觉 |
因为有了视觉我们才能看见世界,才能更好地进行互动交流,据调查统计,人与外界交互的信息约80%通过眼睛得到。倘若想让机器人更好地为人类服务,给它安装上眼睛,让其拥有视觉无疑是一个很好的思路。 采用深度摄像头方案的原因 选择自主移动机器人的“眼睛”有讲究,华捷艾米公司采用深度摄像头方案,主要原因在于激光雷达技术很成熟,但缺点是只在一个平面,遇到有凸出的面,就会撞上去;单摄像头简单,但只能应付简单场景;双摄像头只能做特定的事情,不看好用其做通用视觉方法;最后是深度摄像头,尽管做硬件难度大,软件需要的东西多,计算颇为复杂,但这个方法获取的数据是最多、最好的,因此也是最主要的视觉机器人导航的方法。 前途是光明的,道路是曲折的 目前机器人已经能够进行简单的对话,而视觉系统则发展到图像匹配,人脸识别的程度,要达到能够自然地进行人机交互,还有漫长的一段路要走,究其原因在于图像和视频的数据量是语音的百倍甚至千倍,前台瓶颈点在深度传感器,后台则涉及到计算。
人眼看见世界需要获得两个维度的信息,包括颜色和空间信息XYZ,关于XYZ空间信息的获取技术,整个行业刚刚开始成熟。华捷艾米公司把采集的每一个点的XYZ距离信息拿出来,做一个冷暖色调方案着色方案,距离近的点用亮色调,距离远的用暗色调。
为了获得具体的深度图像,华捷艾米采用结构光方案,让IMI深度摄像头能清楚地辨别物体距离、轮廓等信息,IMI的红外发射器发射出红外光,红外光通过光栅产生相对随机但又固定的斑点图样,均匀地投射到测量空间,测量空间的粗糙物体反射,形成随机的散斑,再通过红外摄影机观测空间的每个散斑,通过晶片的计算便得到3D深度图像。
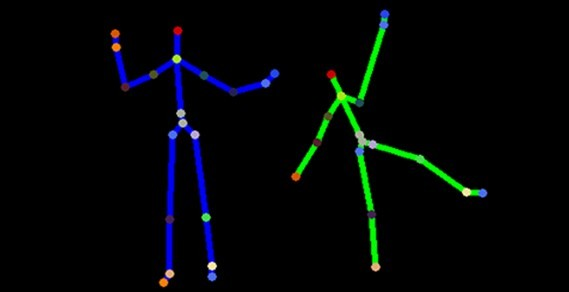
IMI深度摄像头再将捕捉到的深度图像与本身内部存有的人体模型相对照。每一个符合内部已存人体模型的物体就会被创造成相关的骨骼模型,IMI系统再将该模型转换成虚拟角色,该角色通过识别该人体骨骼模型的关键部位进行动作触发。在虚拟骨骼模型的帮助下,可识别人体的20个关节点。 在完善了视觉功能后,相信未来,未来机器人不光可以语音对话、看见世界,甚至还能拥有跟人类一样的感官体会,为我们的生活带来更多便捷有趣的体验。 |